|
cisst-saw
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
cisst-saw
|
#include <robFunctionSO3.h>
Public Member Functions | |
| robFunctionSO3 (void) | |
| robFunctionSO3 (double t1, const vctQuaternionRotation3< double > &qw1, const vctFixedSizeVector< double, 3 > &w1, const vctFixedSizeVector< double, 3 > &w1d, double t2, const vctQuaternionRotation3< double > &qw2, const vctFixedSizeVector< double, 3 > &w2, const vctFixedSizeVector< double, 3 > &w2d) | |
| robFunctionSO3 (double t1, const vctMatrixRotation3< double > &Rw1, const vctFixedSizeVector< double, 3 > &w1, const vctFixedSizeVector< double, 3 > &w1d, double t2, const vctMatrixRotation3< double > &Rw2, const vctFixedSizeVector< double, 3 > &w2, const vctFixedSizeVector< double, 3 > &w2d) | |
| virtual | ~robFunctionSO3 () |
| virtual void | Evaluate (double, vctQuaternionRotation3< double > &, vctFixedSizeVector< double, 3 > &, vctFixedSizeVector< double, 3 > &) |
| virtual void | Evaluate (double, vctMatrixRotation3< double >, vctFixedSizeVector< double, 3 > &, vctFixedSizeVector< double, 3 > &) |
| virtual void | Blend (robFunction *function, double wmax, double wdmax)=0 |
| void | InitialState (vctQuaternionRotation3< double > &q, vctFixedSizeVector< double, 3 > &w, vctFixedSizeVector< double, 3 > &wd) |
| void | FinalState (vctQuaternionRotation3< double > &q, vctFixedSizeVector< double, 3 > &w, vctFixedSizeVector< double, 3 > &wd) |
 Public Member Functions inherited from robFunction Public Member Functions inherited from robFunction | |
| robFunction (void) | |
| robFunction (double startTime, double stopTime) | |
| virtual | ~robFunction () |
| void | Set (double startTime, double stopTime) |
| Set start and stop time. More... | |
| virtual double & | StartTime (void) |
| Return start time. More... | |
| virtual double & | StopTime (void) |
| Return stop time. More... | |
| virtual double | Duration (void) const |
| Return duration. More... | |
Protected Attributes | |
| vctQuaternionRotation3< double > | qw1 |
| vctFixedSizeVector< double, 3 > | w1 |
| vctFixedSizeVector< double, 3 > | w1d |
| vctQuaternionRotation3< double > | qw2 |
| vctFixedSizeVector< double, 3 > | w2 |
| vctFixedSizeVector< double, 3 > | w2d |
| Protected Attributes inherited from robFunction | |
| double | t1 |
| double | t2 |
| robFunctionSO3::robFunctionSO3 | ( | void | ) |
| robFunctionSO3::robFunctionSO3 | ( | double | t1, |
| const vctQuaternionRotation3< double > & | qw1, | ||
| const vctFixedSizeVector< double, 3 > & | w1, | ||
| const vctFixedSizeVector< double, 3 > & | w1d, | ||
| double | t2, | ||
| const vctQuaternionRotation3< double > & | qw2, | ||
| const vctFixedSizeVector< double, 3 > & | w2, | ||
| const vctFixedSizeVector< double, 3 > & | w2d | ||
| ) |
| robFunctionSO3::robFunctionSO3 | ( | double | t1, |
| const vctMatrixRotation3< double > & | Rw1, | ||
| const vctFixedSizeVector< double, 3 > & | w1, | ||
| const vctFixedSizeVector< double, 3 > & | w1d, | ||
| double | t2, | ||
| const vctMatrixRotation3< double > & | Rw2, | ||
| const vctFixedSizeVector< double, 3 > & | w2, | ||
| const vctFixedSizeVector< double, 3 > & | w2d | ||
| ) |
|
inlinevirtual |
|
pure virtual |
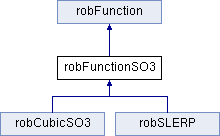
Implemented in robCubicSO3, and robSLERP.
|
inlinevirtual |
Reimplemented in robCubicSO3, and robSLERP.
|
inlinevirtual |
| void robFunctionSO3::FinalState | ( | vctQuaternionRotation3< double > & | q, |
| vctFixedSizeVector< double, 3 > & | w, | ||
| vctFixedSizeVector< double, 3 > & | wd | ||
| ) |
| void robFunctionSO3::InitialState | ( | vctQuaternionRotation3< double > & | q, |
| vctFixedSizeVector< double, 3 > & | w, | ||
| vctFixedSizeVector< double, 3 > & | wd | ||
| ) |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
 1.8.6
1.8.6