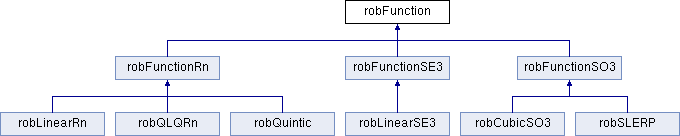
Base class for robot function.
More...
#include <robFunction.h>
Base class for robot function.
| robFunction::robFunction |
( |
void |
| ) |
|
| robFunction::robFunction |
( |
double |
startTime, |
|
|
double |
stopTime |
|
) |
| |
| virtual robFunction::~robFunction |
( |
| ) |
|
|
inlinevirtual |
| virtual double robFunction::Duration |
( |
void |
| ) |
const |
|
virtual |
| void robFunction::Set |
( |
double |
startTime, |
|
|
double |
stopTime |
|
) |
| |
Set start and stop time.
- Parameters
-
| startTime | start time |
| stopTime | stop time |
| virtual double& robFunction::StartTime |
( |
void |
| ) |
|
|
virtual |
| virtual double& robFunction::StopTime |
( |
void |
| ) |
|
|
virtual |
The documentation for this class was generated from the following file:
- /home/adeguet1/catkin_ws/src/cisst-saw/cisst/cisstRobot/robFunction.h


 1.8.6
1.8.6