|
cisst-saw
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
cisst-saw
|
#include <robKinematics.h>
Public Types | |
| enum | Convention { UNDEFINED, STANDARD_DH, MODIFIED_DH, HAYATI, MODIFIED_HAYATI } |
| Kinematics convention. More... | |
 Public Types inherited from robJoint Public Types inherited from robJoint | |
| enum | Type { UNDEFINED, HINGE, SLIDER, UNIVERSAL, BALLSOCKET } |
| enum | Mode { ACTIVE, PASSIVE } |
| Joint modes. More... | |
| enum | Errno { ESUCCESS, EFAILURE } |
Public Member Functions | |
| robKinematics (robKinematics::Convention convention) | |
| Default constructor. More... | |
| robKinematics (const robJoint &joint, robKinematics::Convention convention) | |
| Overloaded constructor. More... | |
| virtual | ~robKinematics () |
| robKinematics::Convention | GetConvention () const |
| Return the kinematics convention. More... | |
| robKinematics::Errno | Read (std::istream &is) |
| Read the kinematics parameters and joints parameters. More... | |
| robKinematics::Errno | Write (std::ostream &os) const |
| Write the kinematics parameters and joints parameters. More... | |
| virtual vctFrame4x4< double > | ForwardKinematics (double q) const =0 |
| Get the position and orientation of the link. More... | |
| virtual vctMatrixRotation3 < double > | Orientation (double q) const =0 |
| Get the orientation of the link. More... | |
| virtual vctFixedSizeVector < double, 3 > | PStar () const =0 |
| Return the position of the next (distal) link coordinate frame. More... | |
| virtual robKinematics * | Clone () const =0 |
| Kinematics objects must be able to clone themselves. More... | |
| Public Member Functions inherited from robJoint | |
| robJoint () | |
| Default constructor. More... | |
| robJoint (robJoint::Type type, robJoint::Mode mode, double offset, double min, double max, double ftmax) | |
| robJoint::Type | GetType () const |
| Return the type of the joint. More... | |
| robJoint::Mode | GetMode () const |
| Return the mode of the joint. More... | |
| double | GetPosition () const |
| Return the joint position. More... | |
| double | GetVelocity () const |
| Return the joint velocity. More... | |
| double | GetForceTorque () const |
| Return the joint force or torque. More... | |
| void | SetPosition (double q) |
| Set the joint position. More... | |
| void | SetVelocity (double qd) |
| Set the joint velocity. More... | |
| void | SetForceTorque (double ft) |
| Set the force/torque. More... | |
| double | PositionOffset () const |
| Return the offset position. More... | |
| double | PositionMin () const |
| Return the minimum position. More... | |
| double | PositionMax () const |
| Return the maximum position. More... | |
| double | ForceTorqueMax () const |
| Return the maximum force/torque. More... | |
Static Public Member Functions | |
| static robKinematics * | Instantiate (const std::string &type) |
| Instantiate a kinematic convention by name. More... | |
Protected Member Functions | |
| virtual void | ReadParameters (std::istream &is)=0 |
| Read the parameters of the kinematics convention. More... | |
| virtual void | WriteParameters (std::ostream &os) const =0 |
| Write the parameters of the kinematics convention. More... | |
| robKinematics::robKinematics | ( | robKinematics::Convention | convention | ) |
Default constructor.
| robKinematics::robKinematics | ( | const robJoint & | joint, |
| robKinematics::Convention | convention | ||
| ) |
Overloaded constructor.
|
inlinevirtual |
|
pure virtual |
Kinematics objects must be able to clone themselves.
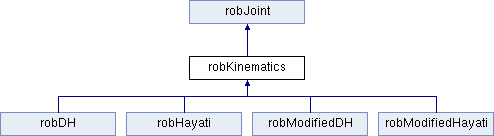
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
|
pure virtual |
Get the position and orientation of the link.
Returns the position and orientation of the link with respect to the proximal link for a given joint vale.
| joint | The joint associated with the link |
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
|
inline |
Return the kinematics convention.
|
static |
Instantiate a kinematic convention by name.
|
pure virtual |
Get the orientation of the link.
Returns the orientation of the link with respect to the proximal link for a given joint vale.
| joint | The joint associated with the link |
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
|
pure virtual |
Return the position of the next (distal) link coordinate frame.
This method returns the $XYZ$ coordinates of the origin of the distal link in the coordinate frame of the proximal link. "PStar" is not a good name for this but the literature uses $ {p}^* $ to denote this value.
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
|
virtual |
Read the kinematics parameters and joints parameters.
Reimplemented from robJoint.
|
protectedpure virtual |
Read the parameters of the kinematics convention.
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
|
virtual |
Write the kinematics parameters and joints parameters.
Reimplemented from robJoint.
|
protectedpure virtual |
Write the parameters of the kinematics convention.
Implemented in robModifiedHayati, robHayati, robDH, and robModifiedDH.
 1.8.6
1.8.6