|
cisst-saw
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
cisst-saw
|
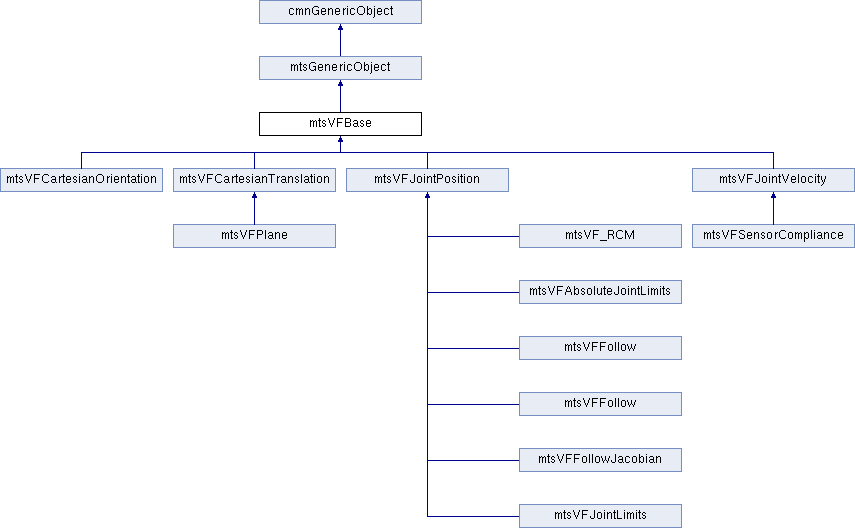
This is the base class for all virtual fixture objects. More...
#include <mtsVFBase.h>
Public Types | |
| enum | CONTROLLERMODE { JPOS = 1, JVEL = 2 } |
Public Member Functions | |
| mtsVFBase () | |
| mtsVFBase (const std::string &name, mtsVFDataBase *data) | |
| ~mtsVFBase () | |
| void | ReserveSpace (nmrConstraintOptimizer &co) |
| Reserves space in the control optimizer. More... | |
| void | LookupStateData (const std::map< std::string, prmKinematicsState * > &k, const std::map< std::string, prmSensorState * > &s) |
| Updates internal state data. More... | |
| void | SetTableauRefs (nmrConstraintOptimizer &co) |
| Updates internal references with co tableau. More... | |
| virtual void | FillInTableauRefs (const mtsVFBase::CONTROLLERMODE Mode, const double TickTime)=0 |
| Updates co with virtual fixture data. More... | |
| vctDoubleMat | Skew (const vctDoubleVec &in) |
| virtual void | ConvertRefs (const mtsVFBase::CONTROLLERMODE mode, const double TickTime)=0 |
| Converts the data in the references if a change in mode is needed. More... | |
| virtual void | AssignRefs (const mtsVFBase::CONTROLLERMODE, const double, const vctDoubleVec &, vctDoubleMat &, vctDoubleVec &, vctDoubleMat &, vctDoubleVec &, vctDoubleMat &, vctDoubleVec &) |
 Public Member Functions inherited from mtsGenericObject Public Member Functions inherited from mtsGenericObject | |
| mtsGenericObject (void) | |
| mtsGenericObject (double timestamp, bool automaticTimestamp, bool valid) | |
| mtsGenericObject (const mtsGenericObject &other) | |
| virtual | ~mtsGenericObject (void) |
| bool | SetTimestampIfAutomatic (double timestamp) |
| virtual void | ToStream (std::ostream &outputStream) const |
| virtual void | ToStreamRaw (std::ostream &outputStream, const char delimiter= ' ', bool headerOnly=false, const std::string &headerPrefix="") const |
| virtual bool | FromStreamRaw (std::istream &inputStream, const char delimiter= ' ') |
| virtual void | SerializeRaw (std::ostream &outputStream) const |
| virtual void | DeSerializeRaw (std::istream &inputStream) |
| size_t | ScalarNumber (void) const |
| bool | ScalarNumberIsFixed (void) const |
| double | Scalar (const size_t index) const throw (std::out_of_range) |
| std::string | ScalarDescription (const size_t index, const std::string &userDescription="") const throw (std::out_of_range) |
| Public Member Functions inherited from cmnGenericObject | |
| virtual | ~cmnGenericObject (void) |
| virtual const cmnClassServicesBase * | Services (void) const =0 |
| bool | ReconstructFrom (const cmnGenericObject &other) |
| std::string | ToString (void) const |
| virtual cmnLogger::StreamBufType * | GetLogMultiplexer (void) const |
| virtual double | Scalar (const size_t CMN_UNUSED(index)) const throw (std::out_of_range) |
| virtual std::string | ScalarDescription (const size_t CMN_UNUSED(index), const std::string &CMN_UNUSED(userDescription)) const |
Public Attributes | |
| std::string | Name |
| Name of the virtual fixture. More... | |
| mtsVFDataBase * | Data |
| Internally stored data. More... | |
| std::vector< prmKinematicsState * > | Kinematics |
| Frame object. More... | |
| std::vector< prmSensorState * > | Sensors |
| Sensor object. More... | |
| vctDoubleVec | DOFSelections |
| vctDynamicMatrixRef< double > | ObjectiveMatrixRef |
| Objective data reference. More... | |
| vctDynamicMatrixRef< double > | ObjectiveMatrixSlackRef |
| Objective slack reference. More... | |
| vctDynamicVectorRef< double > | ObjectiveVectorRef |
| Objective vector reference. More... | |
| vctDynamicMatrixRef< double > | IneqConstraintMatrixRef |
| Inequality constraint data reference. More... | |
| vctDynamicMatrixRef< double > | IneqConstraintMatrixSlackRef |
| Inequality constraint slack reference. More... | |
| vctDynamicVectorRef< double > | IneqConstraintVectorRef |
| Inequality constraint vector reference. More... | |
| vctDynamicMatrixRef< double > | EqConstraintMatrixRef |
| Equality constraint data reference. More... | |
| vctDynamicMatrixRef< double > | EqConstraintMatrixSlackRef |
| Equality constraint slack reference. More... | |
| vctDynamicVectorRef< double > | EqConstraintVectorRef |
| Equality constraint vector reference. More... | |
Static Public Attributes | |
| static std::string | DefaultKinematicsName |
This is the base class for all virtual fixture objects.
mtsVFBase: A class that contains logic for the implementation of virtual fixtures
|
inline |
Constructor
| mtsVFBase::mtsVFBase | ( | const std::string & | name, |
| mtsVFDataBase * | data | ||
| ) |
Constructor
| name | String name of object |
| ObjectiveRows | Size of objective |
| IneqConstraintRows | Size of inequality constraint |
| EqConstraintRows | Size of equality constraint |
|
inline |
|
inlinevirtual |
Reimplemented in mtsVFCartesianOrientation, and mtsVFCartesianTranslation.
|
pure virtual |
Converts the data in the references if a change in mode is needed.
Implemented in mtsVFCartesianOrientation, mtsVFCartesianTranslation, mtsVFJointPosition, and mtsVFJointVelocity.
|
pure virtual |
Updates co with virtual fixture data.
FillInTableauRefs
Implemented in mtsVFSensorCompliance, mtsVFFollow, mtsVFCartesianOrientation, mtsVFCartesianTranslation, mtsVFFollow, mtsVFFollowJacobian, mtsVFPlane, mtsVFJointPosition, mtsVFJointVelocity, mtsVFAbsoluteJointLimits, mtsVFJointLimits, and mtsVF_RCM.
| void mtsVFBase::LookupStateData | ( | const std::map< std::string, prmKinematicsState * > & | k, |
| const std::map< std::string, prmSensorState * > & | s | ||
| ) |
Updates internal state data.
UpdateStateData
| k | A map of names to kinematics objects |
| s | A map of names to sensor objects |
| void mtsVFBase::ReserveSpace | ( | nmrConstraintOptimizer & | co | ) |
Reserves space in the control optimizer.
reserve_space
| co | Control optimizer object |
| void mtsVFBase::SetTableauRefs | ( | nmrConstraintOptimizer & | co | ) |
Updates internal references with co tableau.
UpdateTableauRefs
| co | The control optimizer object |
| vctDoubleMat mtsVFBase::Skew | ( | const vctDoubleVec & | in | ) |
| mtsVFDataBase* mtsVFBase::Data |
Internally stored data.
|
static |
| vctDoubleVec mtsVFBase::DOFSelections |
| vctDynamicMatrixRef<double> mtsVFBase::EqConstraintMatrixRef |
Equality constraint data reference.
| vctDynamicMatrixRef<double> mtsVFBase::EqConstraintMatrixSlackRef |
Equality constraint slack reference.
| vctDynamicVectorRef<double> mtsVFBase::EqConstraintVectorRef |
Equality constraint vector reference.
| vctDynamicMatrixRef<double> mtsVFBase::IneqConstraintMatrixRef |
Inequality constraint data reference.
| vctDynamicMatrixRef<double> mtsVFBase::IneqConstraintMatrixSlackRef |
Inequality constraint slack reference.
| vctDynamicVectorRef<double> mtsVFBase::IneqConstraintVectorRef |
Inequality constraint vector reference.
| std::vector<prmKinematicsState *> mtsVFBase::Kinematics |
Frame object.
| std::string mtsVFBase::Name |
Name of the virtual fixture.
| vctDynamicMatrixRef<double> mtsVFBase::ObjectiveMatrixRef |
Objective data reference.
| vctDynamicMatrixRef<double> mtsVFBase::ObjectiveMatrixSlackRef |
Objective slack reference.
| vctDynamicVectorRef<double> mtsVFBase::ObjectiveVectorRef |
Objective vector reference.
| std::vector<prmSensorState *> mtsVFBase::Sensors |
Sensor object.
 1.8.6
1.8.6